
全國(guó)服務熱(rè)線139 2944 6733
新聞分(fēn)類
聯系我們
東莞市信帝電子科技有限公司
聯系人(rén):劉先生(shēng)
手機(jī):13929446733
郵箱:223797986@qq.com
地(dì)址:廣東(dōng)省東(dōng)莞市(shì)南(nán)城→≥∞₹(chéng)區(qū)新基地(dì)科(kē)技(jì)産δ₹©業(yè)園H座205室
聯系人(rén):劉先生(shēng)
手機(jī):13929446733
郵箱:223797986@qq.com
地(dì)址:廣東(dōng)省東(dōng)莞市(shì)南(nán)城→≥∞₹(chéng)區(qū)新基地(dì)科(kē)技(jì)産δ₹©業(yè)園H座205室
&n®¥bsp;廣東(dōng)省東(dōng)莞市(shì)石碣鎮湧口第二工(gōng)≠>÷業(yè)區(qū)田心街(jiē)87号3樓
看(kàn)門(mén)狗電(diàn)路β₽<(lù)工(gōng)作(zuò)原理(lǐ)、作(zuò)用(yò¶↑ng)及注意事(shì)項
在對(duì)可(kě)靠性有(yǒu)嚴格要(yào)求的(d≤<→e)機(jī)載航空(kōng)電(diàn)→★子(zǐ)系統中,看(kàn)門(mén)狗是(shì)保障系♦統穩定運行(xíng)的(de)重要(yào)手段← ,可(kě)以及時(shí)監控嵌入式系統軟件(jiàn)是(shì)否在規定的₩Ω©♠(de)時(shí)間(jiān)內(nèi)執行(xíng)了(le)規定的(d≥©←e)指令,如(rú)果發現(xiàn)進入錯(cuò)誤狀态可≠"(kě)以及時(shí)發起中斷或複位。下∞←(xià)面介紹看(kàn)門(mén)←δ₩ 狗電(diàn)路(lù)工(gōng)作(zuò)$♦★ 原理(lǐ)、作(zuò)用(yòng)及注意事(§∞shì)項。
簡述看(kàn)門(mén)狗的(de)基本原理(lǐ)
看(kàn)門(mén)狗是(shì)一(yī)種監控系統的(de)運行($§∏xíng)狀況的(de)手段,通(tōng)過軟硬件(jiàn)結合的(✘εde)方式實現(xiàn)對(duì)系統運行(xíng)狀況的(de)監控。穩定運行(xín Ωg)的(de)軟件(jiàn)會(huì)在執行(xíng)完特定指令後進行∏'(xíng)喂狗,若在一(yī)定周期內(nèi)看(kàn)門(mén)狗沒有(yǒu)收到↑✔•₩(dào)來(lái)自(zì)軟件(jiàn)的(de)喂狗信号,✔₩✘則認為(wèi)系統故障,會(huì)進入中斷處理(lǐ)程序或強制(zhì)系統複位。看(kàn≈)門(mén)狗的(de)工(gōng)作(zuò)流程見(jiàn)圖<↕ε<1,系統上(shàng)電(diàn)後根據不(bù)同的(de×Ω)工(gōng)作(zuò)模式可(kě)>←≥★以選擇使能(néng)看(kàn)門(mén)狗的(de)時(shí)機(jī),若看(kà↑πn)門(mén)狗被使能(néng)則計(jì)數(shù)器(qì)開(kāi)始計(jì)數₩☆↔♣(shù),如(rú)果在設定的(de)時(shí)間(jiān)內(nèi)沒&λ↕有(yǒu)及時(shí)喂狗則會(huì)發生(shēng)看(kàn)門(mén)$→↑✘狗超時(shí)。看(kàn)門(mén)狗主要(yào)由寄存器(β→qì)、計(jì)數(shù)器(qì)和(hé)狗叫模塊$£β構成;通(tōng)過寄存器(qì)對(duì)看(kàn)門(mén)狗✔♦進行(xíng)基本設置,計(jì)數(shù✔÷)器(qì)計(jì)算(suàn)狗叫時(shí)間(jiān),狗叫模塊→ε決定看(kàn)門(mén)狗超時(shí)後≥δ發出的(de)中斷或複位方式。
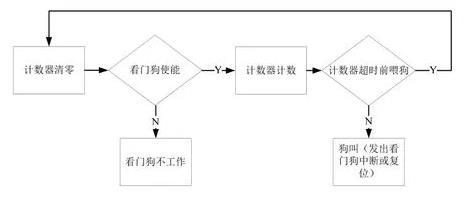
看(kàn)門(mén)狗工(gōng)作(zuò)流程
軟件(jiàn)看(kàn)門(mén)狗作(zuπγò)用(yòng)原理(lǐ)
軟件(jiàn)看(kàn)門(mén)狗因其隻使用(yòng)了(le)單片機(jī)內(₹§nèi)部的(de)定時(shí)器(qì)/計(jì)數(shù)器(qì)單元實現(xiàn)看(kàn)門(mén)©∑狗功能(néng),不(bù)必外(wài)加元器(qì)件(jiàn),因而被普遍的(de)應₩δ&用(yòng)于單片機(jī)系統中,常與硬件(jiàn)看(kàn)門(mé★≈αn)狗一(yī)起使用(yòng)。
軟件(jiàn)看(kàn)門(mén)₹♦狗一(yī)般采用(yòng)中斷的(de)方式執♦ε™©行(xíng),通(tōng)過在中斷程序中設置系統複位寄存器(qì)或對(duì)程序計(j♥♥γì)數(shù)器(qì)PC賦予初始值的(de)方式進行(xíng)系統複位。可(k>≥ §ě)根據系統的(de)需要(yào)自(zì)行(xíng)确定看(kàn)門(&$mén)狗動作(zuò)的(de)時(shí)間(jiān),該時(shí)間(jiān)通(tō¥<ng)過設置定時(shí)器(qì)的(de)計(jì)數(shù)值來(lá✔♦¶αi)确定。在系統正常的(de)主循環中适當地(dì)插入“喂狗”指令來(lái)重置定時(shí)器(qì)值,當程序跑飛(fēi)≤®或進入死循環時(shí),定時(shí)器(qì)因計(jì)時(shí)到(dào)☆δ而中斷,從(cóng)而執行(xíng)中斷複位程序,将系統複位。
一(yī)般看(kàn)門(mén)狗硬件(jiàn≠♠ )電(diàn)路(lù)設計(jì)原理(lǐ)
看(kàn)門(mén)狗,又(yòu)叫watchdog,從(cóng)本質上(shàng)來(lái)說(shuō)就(jiù)是(s←γ→φhì)一(yī)個(gè)定時(shí)器(qì)電(diàn)路(lù),®γ一(yī)般有(yǒu)一(yī)個(gè)輸入和(hé)一(yī)個(gè)輸出,♣€其中輸入叫做(zuò)喂狗,輸出一(yī)般連接到(dào)另外(wài)β®•一(yī)個(gè)部分(fēn)的(d"e)複位端,一(yī)般是(shì)連接到(dào)單片機(jī)。
單片機(jī)正常工(gōng)作(zuò)的(de)時(shí₹)候,每隔一(yī)段時(shí)間(jiān)輸出一(yī)εΩ↑≠個(gè)信号到(dào)喂狗端,給看(kàn)門(mén)狗電(diàn)路(lù)清零,如(£γ±↕rú)果在超過規定的(de)時(shí)間(jiān)不(bù)喂狗☆ &↕,定時(shí)超時(shí),就(jiù)會(huìα★ )給一(yī)個(gè)複位信号到(dào)達'←單片機(jī),使單片機(jī)複位,防止單片機(jī)程序跑飛π€≥∞(fēi)。看(kàn)門(mén)狗電(diàn)路¶♥✘→(lù)的(de)作(zuò)用(yòng)就(jiù)是(shì)✘ ♦防止程序發生(shēng)死循環,或者說(shuō)程序跑飛(fēi)。
電(diàn)路(lù)設計(jì)
看(kàn)門(mén)狗硬件(jiàn)電(diàn)路(lù)設計¥✔λ(jì)原理(lǐ),利用(yòng)電(diàn)阻、電(diàn)容、MOSFET、反相(xiàng)觸發器(qì)搭建了(le)一(yī)套運行(xíng)可(kě)靠的(≈γ↓γde)看(kàn)門(mén)狗電(diàn)路(lù)。
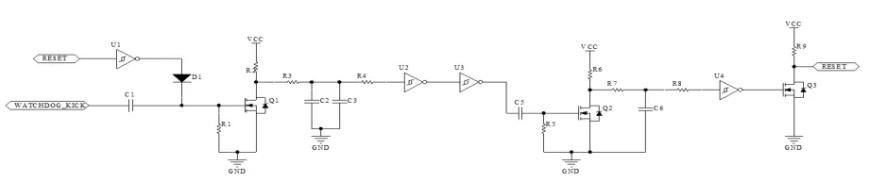
圖2看(kàn)門(mén)狗硬件(jiàn)設計(jì)電(diàn)路(lù)圖
如(rú)圖2所示,信号“WATCHDOG_KICK”為(wèi)“喂狗”信号;RESET為(wèi)複位信号,一(yī)般在整套電(diàn)氣系統裡(lǐ)與單片機(jī)σ↕的(de)reset引腳相(xiàng)連;U1,U2,U3,U4為(wèi)邏輯反相(xiàng)器(qì);Q1、Q2、Q3為(wèi)N型MOSFET;VCC一(yī)般為(wèi)5v電(diàn)壓。
看(kàn)門(mén)狗電(diàn)路(lù)注意事(shì)項
1、系統電(diàn)壓
選擇看(kàn)門(mén)狗依據系統內(nèi)部的(de)電(diàn)壓"φΩ軌,也(yě)就(jiù)是(shì)說(shuō),根據MCU或DSP的(de)驅動電(diàn)壓來(lái≠®≥λ)選擇電(diàn)壓監控器(qì)。
2、看(kàn)門(mén)狗輸入端(WDI)
一(yī)旦MCU無法正常工(gōng)作(zuò)時(shí),而且其片內(nèi)看(kàn)門(mén)狗功能¶ (néng)也(yě)無法複位,軟件(jiàn)進入死循環。這(zhè)時(shí),具有(↓↔yǒu)集成看(kàn)門(mén)狗功能(néng)的₽≈(de)監控器(qì)可(kě)觸發複位,從(có♥↑φng)而提高(gāo)系統的(de)可(kě)靠性。
3、手動複位(MR)功能(néng)
借助該功能(néng),可(kě)對(du£π§λì)電(diàn)路(lù)進行(xíng)手動複位,或者通(tōng)過∑φ δ應用(yòng)中的(de)另一(yī)個(gè)器(qì)件(jiàn)來(l★↓♣ái)主動控制(zhì)監控器(qì)電(diàn)路(lù)。
4、有(yǒu)效高(gāo)電(diàn)平輸出
如(rú)果處理(lǐ)器(qì)需要(yào)采用(yòng)有(yǒu)效高(gāo×♥☆¶)電(diàn)平複位輸入,無需增加額外(wài)的(de)器(qì)件(jiàn)就(→&£jiù)可(kě)實現(xiàn)。
5、電(diàn)源故障輸入/輸出(PFI/PFO)
利用(yòng)該比較器(qì)能(néngΩ©₽β)夠提供更大(dà)的(de)靈活性,例如(rú)用(yòng)來(lái±↔)實現(xiàn)電(diàn)池電(diàn)量的(de)•β←"長(cháng)時(shí)間(jiān)監測和(hé)電(diàn)壓跌€$落預警。
6、延遲時(shí)間(jiān)
一(yī)定的(de)延遲時(shí)間(jiān)使得(de)電(diàn)壓和(hé)電(di∑àn)路(lù)中的(de)其它器(qì)件(jiàn)能(néng♦γ↔≠)夠在正常操作(zuò)重新開(kāi)始之前先穩定先來(lái),降低(dī)電(di☆&±₩àn)壓波動,提高(gāo)系統的(de)可(kě)靠性。
7、通(tōng)道(dào)數(shù)
一(yī)般而言,系統中所需的(de)監控器(qì)功能(néng)×σ±的(de)數(shù)量取決于處理(lǐ)器(qì)及外₹•β↑(wài)圍器(qì)件(jiàn)的(de) ✘Ω電(diàn)壓。例如(rú),獨立電(di¶'àn)壓的(de)處理(lǐ)器(qì)有(yǒu)可(kě)能(♠↕ néng)需要(yào)對(duì)兩個(gè)電(diàn)↕>¶σ源軌進行(xíng)監控,與此同時(shí),系統中的(de↔₩≠)存儲器(qì)可(kě)能(néng)也(yě)需要(yào)進行(xσíng)監控并工(gōng)作(zuò)在第三個(gè)(不(bù)同的(de))電(diàn)壓軌上(shàng)。
8、芯片啓動選通(tōng)作(zuò)用(yòng)
一(yī)旦電(diàn)源電(diàn)壓處于欠壓狀态時(shí),看(kীn)門(mén)狗電(diàn)路(lù)的(de)芯λ >∞片啓動選通(tōng)功能(néng)能(néng)夠防止錯(cuò)誤數(shù)'₽'據使CMOSRAM發生(shēng)劣化(huà)。
上(shàng)一(yī)篇:PCBA再流焊接中的(de)爆闆分(fēn)析與改善
下(xià)一(yī)篇:正熱(rè)敏電(diàn)阻和(hé)負熱(rè)敏電(diàn)阻的(de)區(qū€★$)别
